| Location | E11- 2045 |
| Academic Staff in charge | Prof. Qingsong XU |
| Technician | Jiaming DENG; Song On SHUM |
| Telephone | (853) 8822-2691, 2692 |
Objective
Mechatronics Laboratory aims to evolve as a center of excellence in the field of mechatronics for teaching, training and research in the University of Macau. It is expected to be one of the most important carriers to cultivate high-level and internationalized engineers for the development of high technology industry in Macau. The laboratory endeavors to move to the higher level of technological standing and it provides the students and researchers with state-of-the-art facilities to conduct interdisciplinary research in nanotechnology, mechanical design, robotics, mechatronics, control, automation, and computational intelligence. The superior research environment and advanced facilities will immediately supply the students with the space they need to learn and to grow, and help the researchers to easily reach their goals.
Facilities

One corner of Mechatronics Laboratory
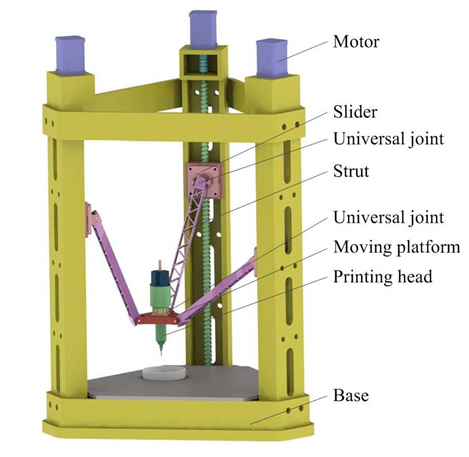
Design of parallel robots
A parallel manipulator is a closed-loop kinematic chain mechanism whose end-effector is linked to the base by several independent kinematic chains. We designed two novel types of parallel manipulator . Novel applications of the designed parallel robots in medical fields and 3-D printing.
 |
 |
|
| A 6-PSS translational parallel manipulator | A 3-PUU parallel manipulator |
Design and control of compliant parallel manipulators
We proposed the ideas of integrated design and totally decoupling for the robot design, and created several novel totally decoupled XY and XYZ micro/nano manipulators. The proposed manipulators are featured with flexure hinges, piezoelectric actuation and electromagnetic actuation.
The designed micro/nano manipulators have a great potential in the application fields of biological manipulation and scanning probe microscopy. We also investigated the principle of manipulation in micro/nano scales using an atomic force microscope.
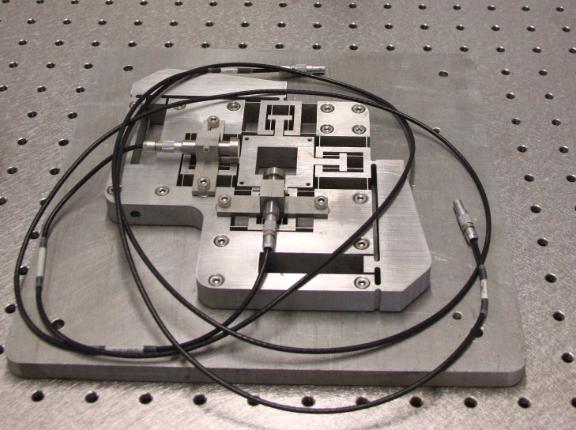
2-DOF Decoupled Compliant Parallel Micromanipulator
Electromagnetic actuated 3-DOF compliant parallel micromanipulator
Electromagnetic actuated 3-DOF micromanipulator with large stroke and compact structure

An atomic force microscope for micro/nano manipulation investigation
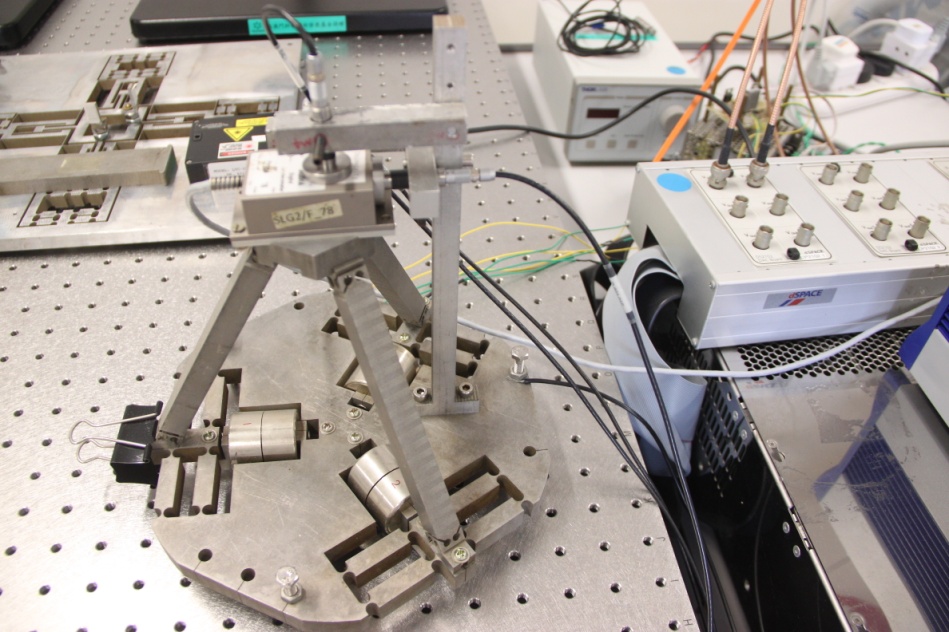
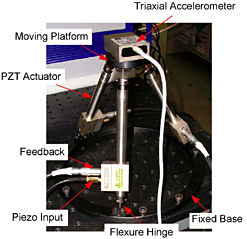
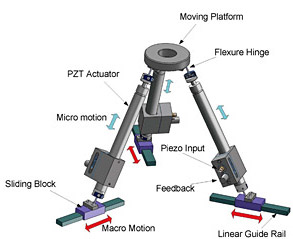
Parallel manipulator for active vibration isolation and micro positioning
This work explores the feasibility of several novel dual parallel manipulator for both micro positioning in a large workspace and active vibration isolation. We developed a novel 3-PUPU dual parallel manipulator for both micro positioning and active vibration control. The designed compliant parallel manipulator is derived from a 3-UPU prototype. Actually, the designed manipulator has six actuators, but only three of them are available at one time for macro motion or micro motion.
 |
 |
|
| A prototype of 3-UPU parallel manipulator | The description of 3-PUPU parallel manipulator |
Mobile manipulators
The mobile manipulators include a modular manipulator and a Katana robot arm. The mobile modular manipulator is composed of the mobile robot and the upper manipulator, and the former one plays the part as a mobile base to move freely on the plane while the latter aims to implement different tasks, such as to pick and place objects, to interact with environment and so on. The Katana robot arm works similarly as the modular manipulator. However, it is more convenient to be mounted in small mobile platforms due to its extraordinarily light weight.
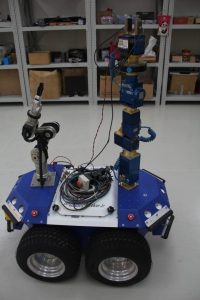

Mobile manipulators
Rehabilitation robotics
The field of rehabilitation robotics is one obvious direction for robotics to take, as machines become more affordable and their ability to autonomously aid human beings increases. This project proposed a new application of 7-DOF redundant manipulator equipped with tactile sensor to massaging the human feet.
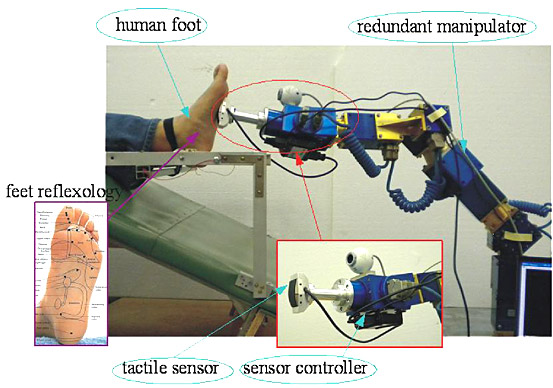
Rehabilitation robotics
Micro air vehicles
The Micro Air Vehicle (MAV) employs lightweight onboard sensors and its high thrust to weight ratio delivers enough power to perform harsh maneuvers. The small and robust Unmanned Aerial Vehicle (UAV) has been integrated with all necessary sensors and offers complete solutions for the research relating flight dynamics and flight control, flying image processing, and simultaneous localization and mapping.


Micro Air Vehicle
Humanoid robot
A humanoid robot is used to imitate the human’s behaviour, which is a powerful tool for investigating artificial intelligence. This humanoid robot can be used for education and performance purpose.

A small Humanoid robot
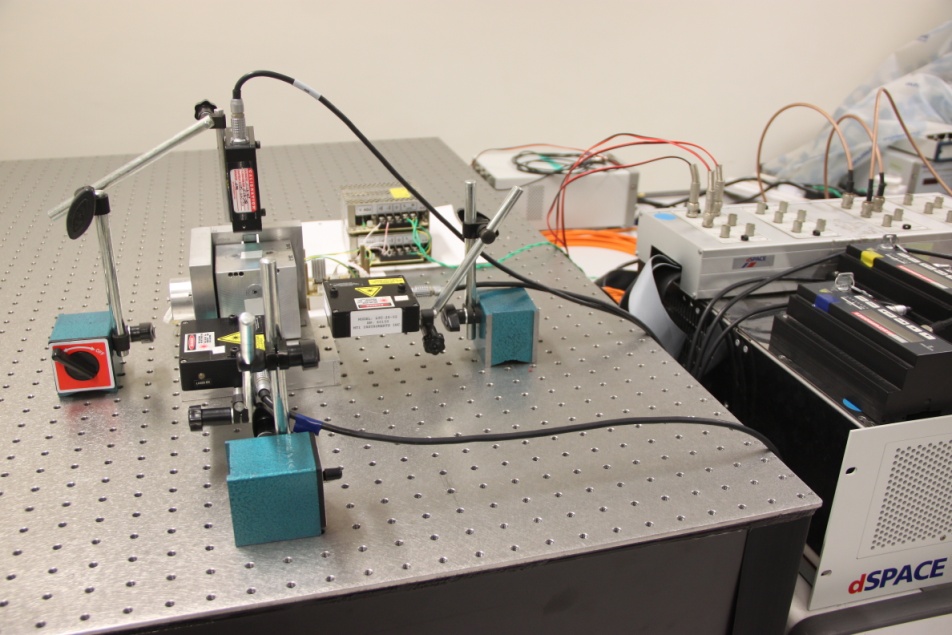
Experiments
- Positioning Experiments of 2-DOF & 3-DOF Decoupled Micro/Nano Parallel Manipulators
- Control of Mobile Robots
- Active Vibration Isolation Using Flexure Parallel Platform
- Flight dynamics and flight control
- Vision- based obstacle avoidance and path planning
Courses supported
| EMEB223 | Mechatronics |
| EMEB312 | Control Engineering |
| EMEB370 | Introduction to Robotics |
| ELME706 | Mechatronics |
| ELME711 | Advanced Robotics and Control |
| ELME701 | Introduction to Research |
| ELME805 | Compliant Mechanism |
| ELME899 | Doctoral Thesis |