Inspired by agile insects in nature, a research team led by Prof Zhong Junwen, assistant professor in the Faculty of Science and Technology (FST) of the University of Macau (UM) and a member of the Centre for Artificial Intelligence and Robotics of UM, has developed robotic insects that are only 3cm long with ultrahigh agility and a controlled trajectory. The study has been published in Science Robotics, the top journal in the field of robotics. This is the first time that a research study by Macao scholars has been published in this journal. So far, the journal has published less than ten papers from higher education institutions in the Guangdong-Hong Kong-Macao Greater Bay Area.
In nature, animals that are fast and agile often have a survival advantage. A key fundamental challenge in this study is to develop insect-scale soft robots with ultrahigh agility and good trajectory control comparable to those of real agile insects, and the technical difficulty lies in achieving a fast linear moving speed while maintaining the capability of the robots to make turns. In nature, insects with flexible bodies can dynamically tune the friction force with secretions between their feet and the ground to improve locomotion. In this study, Prof Zhong’s team emulated similar schemes by adjusting the electrostatic force between the robot’s feet and the ground to achieve both ultrahigh agility and a controlled trajectory. The soft robots developed by the team can reach a highest relative centripetal acceleration of 28 body-length/s2, which is better than that of common insects. Through a series of demonstrations, the team has proved that the soft robots can pass through a 120cm-long track in a maze within 5.6 seconds and carry a 180mg on-board sensor to record a gas concentration route map.
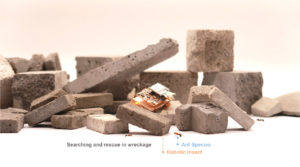
Furthermore, the team has also developed an untethered version of the soft robot, which is battery-powered and can complete a 27.9cm-long S-shape path in 36.9 seconds. An important potential application for such robots is that after a disaster such as an earthquake, a large number of these robots can carry sensors that can move swiftly through the rubble and record and transmit valuable information during the search and rescue process. The related paper, Titled ‘Electrostatic Footpads Enable Agile Insect-scale Soft Robots with Trajectory Control’, is the result of collaboration between UM, Tsinghua University, and the University of California, Berkeley.
Prof Zhong obtained a PhD degree in electrical science and engineering from Huazhong University of Science and Technology in 2016. After graduation, he continued with his research at the University of California, Berkeley, and the Japanese Institute of Physics and Chemistry. In recent years, he has published more than 50 academic papers in internationally renowned journals, with a total of over 4,000 citations. His main research interest is flexible electromechanical systems, particularly flexible robots, flexible sensors, and actuators. Full version of the paper can be viewed at: https://robotics.sciencemag.org/content/6/55/eabe7906
受大自然中敏捷爬行昆蟲的啟發,由澳門大學科技學院助理教授、人工智能機器人研究中心研究成員鍾俊文領導的研究團隊研製了身長僅有3厘米、具高敏捷性與可操控性的電子昆蟲機械人,能在搜索和救援過程中記錄及傳輸有價值的信息。此項研究發表於機械人領域最頂級的國際期刊《科學·機械人學》(Science Robotics)。這是首次有澳門學者的研究獲該期刊刊登,大灣區高等院校的文章獲該刊刊登的數量亦不足10篇。
自然界中,運動敏捷的動物往往具有生存優勢。研製與自然昆蟲一樣敏捷的電子昆蟲是研究小型機械人的一個基礎挑戰。在快速運動過程中,小型機械人需同時擁有優秀的轉彎能力,普通昆蟲可通過分泌粘液來改變腳與地面之間的摩擦力,從而實現快速運動。類似的策略同樣適用於電子昆蟲,但不同的是,是次研究通過調整機械人腳部與於地面間的靜電力來實現高敏捷性和控制運動軌跡。電子昆蟲的相對向心加速度達到28身體長度/秒2,性能勝於目前所有已知的柔性機械人以及普通昆蟲。團隊已進行過多種應用演示,成功證實了電子昆蟲的優秀性能,包括能在5.6秒內通過一個120厘米長的迷宮以及攜帶一個180 mg的氣體傳感器探測氣體洩漏。
此外,研究團隊也研製了由電池驅動的無線版本的電子昆蟲,可以在36.9 秒內走完27.9 厘米長的“S”型路徑。這種機械人的重要潛在應用在,當地震等災難發生後,大量電子昆蟲可以攜帶傳感器在廢墟中敏捷地快速移動,並在搜索和救援過程中記錄和傳輸有價值的信息。相關論文題目為《科學·機械人學》昆蟲尺寸 “柔性機械人擁有的靜電腳掌賦予其高敏捷性與可操控性” (Electrostatic footpads enable agile insect-scale soft robots with trajectory control),是澳門大學、清華大學以及加州大學伯克利分校的合作成果。
鍾俊文於2016年在華中科技大學獲取電氣科學與工程博士學位,畢業後在加州大學伯克利分校和日本理化學研究所開展研究工作。近年在國際知名雜誌發表學術論文50餘篇,所發表文章總引用超過4,000次。研究方向主要是柔性機電系統,其中包括柔性機械人、柔性傳感器及執行器的開發與研究。全文可瀏覽: https://robotics.sciencemag.org/content/6/55/eabe7906
Robotic insects with ultrahigh agility
高敏捷電子昆蟲

Prof. Zhong Junwen
鍾俊文