UM PhD student wins Best Conference Paper Award at IEEE International Conference on Development and Learning 2023
Mr. Zhengyang Li, a PhD student from the Department of Electromechanical Engineering (EME), Faculty of Science and Technology (FST), University of Macau (UM), has won the Best Conference Paper Award at the IEEE International Conference on Development and Learning (ICDL 2023), Macau, China.
The IEEE International Conference on Development and Learning (ICDL) is a joint conference of the IEEE Robotics and Automation Society (RAS) and IEEE Computational Intelligence Society (CIS). ICDL 2023 received an overwhelming number of over 130 papers all around the world. After rigorous evaluation and competitive presentation, two awards including the Best Conference Paper Award and Best Student Paper are selected from the nominated award finalists, with less than one percent of the researchers winning these honors. The Best Conference Paper Award honors the best two papers in the conference.
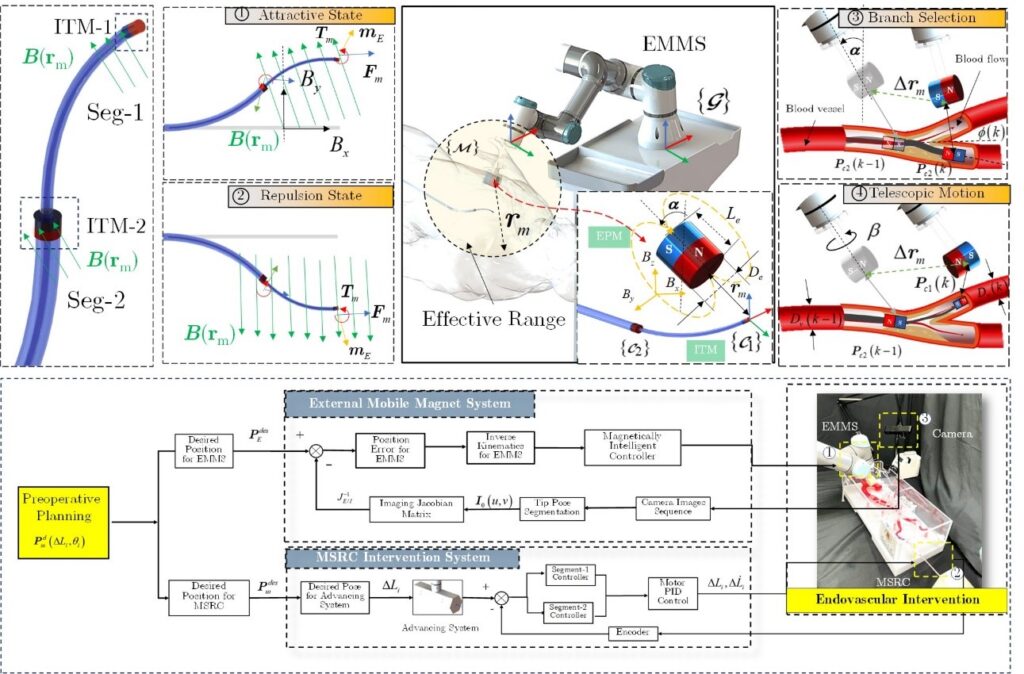
In the finalist presentation section, Mr. Zhengyang Li represented the research group by presenting a paper titled “Intelligent Magnetic Control and Surgical Planning of a Multi-Segment Robotic Catheter for Endovascular Intervention”. The research proposed a multi-segment magnetic soft catheter robot targeted for cardiovascular therapy. The intelligent control framework combines the adaptive control method and preoperative surgical planning, which successfully navigates the magnetic catheter robot in a human-sized arterial model. Its novelty and promising potential in both clinical and training applications are fully recognized by the conference’s committees and receive widespread attention from the robotics community.
This research is supervised by Prof. Qingsong Xu, Professor of Department of Electromechanical Engineering and conducted in the Smart and Micro/Nano Systems Laboratory at the University of Macau. The work is jointly sponsored by the National Natural Science Foundation of China, the Science and Technology Development Fund of Macau, and the University of Macau. This award not only shows the profound strength of Faculty of Science and Technology in technological innovation and industrial application, but also demonstrates the outstanding contribution made by the University of Macau’s cutting-edge research in the field of automation to the upgrading of the robotics and health care industry in Macau and even internationally.
The IEEE International Conference on Development and Learning (ICDL) constitutes an important forum for robotics and intelligent computing society. Its goal is to investigate how biological agents take advantage of interaction with social and physical environments to improve the robotic and computing systems. IEEE ICDL 2023 was held in Macau, China. The first day was held in the E4 building of the University of Macau. Many famous scholars in the field of robotics around the world attended the conference and gave a speech at the University of Macau.
澳大博士生奪2023 IEEE發展與學習國際會議最佳會議論文獎
澳門大學科技學院機電工程系博士研究生李政陽近日參加在中國澳門特別行政區舉行的“IEEE國際發展與學習會議(IEEE International Conference on Development and Learning, ICDL 2023)”,獲得最佳會議論文獎。
IEEE國際發展與學習會議(ICDL)是IEEE機器人與自動化學會(IEEE Robotics and Automation Society, RAS)和IEEE計算智能學會(IEEE Computational Intelligence Society, CIS)的旗艦合辦會議。本屆ICDL 2023收到來自世界各國的130多篇論文。在經過嚴格的評比和競爭後,最終從提名入選者中選出了“最佳會議論文獎”和“最佳學生論文獎”等兩個獎項,授予會議中最好的兩篇論文,而獲得這兩個獎項的研究人員不到1%。
在決賽報告環節,李政陽同學代表課題組做了題為《多段導管機器人血管內介入的智能磁控與手術規劃》的報告。本研究提出了一種針對心血管治療的多段磁性軟導管機器人。該智慧控制框架將自我調整控制方法與術前手術規劃相結合,成功地在人體大小的動脈模型中實現了磁導管機器人的精准導航。它在臨床和培訓應用方面的新穎性和廣闊潛力得到了會議委員會的充分認可,並得到了機器人社區的廣泛關注。
這項研究由澳門大學機電工程系徐青松教授指導,並在澳門大學智能與微納系統實驗室完成。本研究由國家自然科學基金、澳門科學技術發展基金及澳門大學共同資助。該獎項不僅顯示了澳門大學科技學院在科技創新和產業應用方面的深厚實力,也彰顯了澳門大學在自動化領域的前沿研究對澳門乃至國際機器人和醫療健康產業升級所做出的傑出貢獻。
IEEE國際發展與學習會議(IEEE ICDL)是機器人與計算智能學會的重要論壇。它的目標是探討智慧生命體運用社會與環境交互來發展機器人與計算科學的基礎研究。本屆IEEE ICDL 2023在中國澳門特別行政區舉行,其第一天在澳門大學E4樓舉行。多位世界機器人領域的著名學者出席了會議,並在澳門大學發表演講。

Zhengyang Li (left) and Prof. Qingsong Xu 李政陽(左)和徐青松教授